

REVIEW PAPER
Marcus E. Blum1, Jesse Blum2, and Vernon C. Bleich3*
1 Texas A&M University, Natural Resources Institute, 1001 Holleman Drive East, College Station, TX 77840, USA ![]() https://orcid.org/0000-0002-4817-5585
https://orcid.org/0000-0002-4817-5585
2 Raven Environmental Services, Inc., 6 Oak Bend Drive, Huntsville, TX 77320, USA
3 University of Nevada, Reno, Department of Natural Resources and Environmental Sciences, 1664 North Virginia Street, Mail Stop 186, Reno, NV 89557, USA ![]() https://orcid.org/0000-0002-5016-1051
https://orcid.org/0000-0002-5016-1051
*Corresponding Author: vcbleich@gmail.com
Published 29 December 2025 • doi.org/10.51492/cfwj.111.17
Abstract
Unmanned aerial vehicles (UAV), often referred to as unmanned aerial systems (UAS) or drones, are experiencing increasing use by wildlife researchers and for a variety of purposes. When equipped with one or more of the various sensors currently available, these remotely operated platforms are being used to conduct aerial surveys of large mammals occupying a diversity of ecosystems, but more so for species that occupy terrain that is neither as rugged nor topographically extreme as that occupied by mountain sheep. Despite some of the potential advantages offered by this technology, UAVs have not been u sed extensively to survey populations of mountain sheep. In this paper, we provide some background information regarding the (1) utility of these platforms to survey mountain sheep; (2) types of unmanned aerial vehicles currently available; (3) types and limitations of currently available sensors; (4) factors that complicate use of these technologies specifically for surveys of mountain sheep populations; and (5) some additional suggestions, including ways to mitigate some of those complications. For reasons enumerated herein, these aerial platforms and associated sensors currently are used sparingly in mountain sheep habitat, but we predict use will increase substantially as a result of technological advances and the human safety advantages associated with these devices.
Key words: aerial survey, bighorn sheep, Ovis canadensis, Ovis dalli, remote survey, red-green-blue (RGB), safety, survey method, thinhorn sheep, thermal infrared (TIR), unmanned aerial systems (UAS), unmanned arial vehicle (UAV)
| Citation: Blum, M. E., J. Blum, and V. C. Bleich. 2025. Drones, sensors, and their potential utility for mountain sheep surveys. California Fish and Wildlife Journal 111:e17. |
| Editor: Benjamin Carter, Inland Deserts Region |
| Submitted: 4 April 2025; Accepted: 30 June 2025 |
| Copyright: ©2025, Blum et al. This is an open access article and is considered public domain. Users have the right to read, download, copy, distribute, print, search, or link to the full texts of articles in this journal, crawl them for indexing, pass them as data to software, or use them for any other lawful purpose, provided the authors and the California Department of Fish and Wildlife are acknowledged. |
| Competing Interests: The authors have not declared any competing interests. |
Introduction
Aerial drones, which are referred to widely as an unmanned aerial vehicle (UAV) or an unmanned aerial system (UAS), have become increasingly popular and effective tools for conducting population surveys for some species of ungulates, and these devices have the potential to replace manned aircraft for a variety of research or management purposes (Martin 2014a,b; Mo and Bonatakis 2022; Finnegan et al. 2024). Of primary interest among investigators are demographic data, distributional information, and habitat use or selection. In the past, most demographic information including sex and age structure and population estimates have been obtained from aerial surveys conducted by manned aircraft. Drones offer a number of advantages that appeal to wildlife biologists, among which are greater crew safety (Jones et al. 2006; Watts et al. 2010; McMahon et al. 2020); the potential for increased precision and accuracy of demographic parameters (McMahon et al. 2020, 2021; Zabel et al. 2023; J. Blum et al. 2024; Pfeffer et al. 2024); increased cost-effectiveness (Linchant et al. 2015); and because most aerial survey flights are not recorded, there is the potential for enhanced post-survey processing and archival capabilities (Lee et al. 2021; Graves et al. 2022; Ascagorta et al. 2025; Dumenčić et al. 2025). An additional advantage may be a reduction in the level of disturbance (Hodgson and Koh 2016; McMahon et al. 2021; Lenzi et al. 2022), when compared to the responses of wild sheep and other mountain ungulates to helicopters or some low-flying fixed-wing aircraft (Krausman and Hervert 1983; Stockwell et al. 1991; Bleich et al. 1990, 1994; Krausman et al. 1998a,b; Frid 2003; Wehausen and Bleich 2007; Côté et al. 2013; Blum et al. 2023).
Researchers are using UAV methods increasingly in Europe (Witczuk et al. 2017; Sekulic et al. 2021), Africa (Linchant et al. 2018; vanVuuren et al. 2023), Asia (Rahman et al. 2023), and North America (J. Blum et al. 2024). With few exceptions (e.g., Sekulic et al. 2021; Jackson et al. 2024), however, the terrain in which drones currently are being used for wildlife research or management differs greatly from that typically occupied by mountain sheep. There is a glaring difference between the topography in which most investigations have been conducted when compared to the rugged terrain occupied by thinhorn (Ovis dalli) or bighorn (Ovis canadensis) sheep; as a result, drones have not been used widely to survey populations of those mountain ungulates. Indeed, a recent poll of jurisdictions comprising the Western Association of Fish and Wildlife Agencies revealed that only the state of Montana currently is using UAVs to conduct surveys of wild sheep in North America (B. Jex, British Columbia Ministry of Water, Land and Resource Stewardship, pers. comm., 25 January 2025). Thus, the utility of unmanned aerial vehicles and remote sensors for conducting mountain sheep surveys currently remains unproven, but preliminary evaluations are beginning to appear (Melody and Trausch 2024; Padilla et al. 2024).
The use of drones for gathering data for use in demographic investigations is a complex and in-depth topic that cannot be fully covered in a brief review. In the recent past, we have received repeated queries regarding the potential utility of these devices for conducting mountain sheep surveys. Nevertheless, and to the best of our knowledge, there are no published reports describing the efficacy of UAVs or the available sensors that may be appropriate for that purpose. Herein, we (1) share some basic information on important, albeit often overlooked, issues when investigators are considering the application of UAV technology specifically for surveys of mountain sheep populations; (2) describe the configurations, advantages, and limitations of currently available UAVs; (3) discuss the types of sensors used to detect the presence of animals; (4) discuss the efficacy of sensor technology specifically for detecting desert bighorn sheep; and (5) provide some suggestions for overcoming or mitigating those limitations.
Some Basic Considerations
Many challenges to the use of drones for wildlife surveys have been identified (Watts et al. 2010), and to date many of those have been overcome through improvements to platform design and technological enhancements to sensors, navigational equipment, image processing capabilities, and interpretation of data. Enhancements in each of these areas will continue in the future, but it is appropriate to call attention to some basic considerations.
Survey Design
When UAVs are used to conduct aerial surveys, search patterns typically are transect-based (Linchant et al. 2015; Delisle et al. 2022; J. Blum et al. 2024; Pfeffer et al. 2024), rather than based on topographic contours within survey polygons as is common among surveys conducted by aerial survey crews operating in mountainous terrain. Surveys conducted on transect lines likely provide less variation along the flight path than those based on elevational gradients or topographic features. As a consequence, however, use of UAVs to survey mountain sheep presents challenges that will require novel approaches to overcome. For instance, elevation above sea level (i.e., the altitude at which the survey is planned to occur) will affect the performance of the UAV, as with any manned aircraft. Further, false positives (i.e., false detections of animals) may be generated more frequently than when using traditional methods, especially if automated procedures are employed during data analysis (Brack et al. 2018). Thus, it is important to understand the potential biases (e.g., availability bias, perception bias, or the potential for misidentifications or double counting) that can influence results and potentially make them less meaningful (Brack et al. 2018).
It also is critically important that pilots follow aviation guidelines and regulations with respect to licensing, visual line of site (VLOS), height above ground level (AGL), and survey time. Moreover, some agencies prohibit the operation of UAVs on land under their purview or limit the type(s) of sensors that can be employed or the use of some UAVs manufactured outside of the United States, while others prohibit launching UAV platforms within wilderness areas but do not ban flights over those ‘protected’ areas. These, and additional concerns regarding the use of drones in areas occupied by wild sheep (Wild Sheep Foundation 2021) complicate planning and execution of population surveys involving UAV technology.
Size of the Study Area
As with all aerial methods, the size of the area that biologists intend to survey, the demographic information desired, and the most appropriate season in which to conduct the survey must receive serious consideration. Each of these factors will influence the technology to be employed, the survey design, and the probability of acquiring robust and useful information. If the area to be surveyed is large, biologists must consider using fixed-wing drones because of their increased battery life. These UAVs, however, typically are flown at a greater AGL and at higher speed than ‘helicopter-like’ drones, and may result in reduced resolution of images obtained by the camera(s) or sensor(s) being used. This decline in resolution makes it difficult to differentiate between species of similar size (e.g., sympatric mountain sheep and mountain goats [Oreamnos americanus] at northern latitudes, or sympatric bighorn sheep and mule deer [Odocoileus hemionus] and sympatric bighorn sheep and aoudad [Ammotragus lervia] at more southerly latitudes), and further increases the difficulty of distinguishing between the sexes or among age categories (Zrabel et al. 2023).
Ambient Conditions
Time of day and ambient temperature, in particular, are important considerations when thermal infrared sensors (TIR) are to be used. These sensors commonly are associated with increased detection rates, but surface temperatures vary across the landscape and concomitantly reduce contrast between the target species and habitat features, resulting in increased misidentifications of animals (McMahon et al. 2021; Camacho et al. 2023; Zabel et al. 2023; J. Blum et al. 2024; Pfeffer et al. 2024). If surveys are conducted at night in an effort to increase thermal contrasts, the ability to distinguish between sexes or among age classes also will be compromised.
Disturbance
A further consideration must be the potential for disturbance to animals and their responses to the presence of the drone (Ditmer et al. 2015, Afridi et al. 2025). Minimal reactions have been detected among other species of ungulates (vanVuuren et al. 2023), and UAVs may be less apt to affect mountain sheep behavior than are helicopters. Nevertheless, drones may elicit strong behavioral reactions that can have important implications in the context of research, conservation, or management (Bleich et al. 1990, 1994; Stockwell 1991; Stockwell et al. 1991). Avian predators commonly kill juvenile mountain sheep (Stockwell 1991; Scotton and Pletscher 1998; Bleich et al. 2004; Bangs et al. 2005); and golden eagles (Aquila chrysaetos) are sympatric with wild sheep over most of their range (Wakeling et al. in press). Mountain sheep have been injured or killed while fleeing from helicopters during aerial surveys (Wehausen and Bleich 2007), and novel sources of aerial disturbance may influence the behavior of neonates or their dams in other ways including separation of mother and offspring, taking refuge in dense vegetation, movement of individuals among pre-determined survey polygons, or affecting behavioral activities such as foraging and nursing (Bleich et al. 1990, 1994; Stockwell et al. 1991; Brushett et al. 2023; M. Blum et al. 2024). Thinhorn sheep react strongly to helicopters in regions wherein golden eagles are abundant and potentially will respond similarly to a UAV (B. Jex, pers. comm., 25 January 2025). Further, Rocky Mountain bighorn sheep have reacted adversely to UAVs operating at low AGL, as evidenced by splintering of social groups and movements away from the source of disturbance (T. Smucker, Montana Fish, Wildlife, and Parks, pers. comm., 24 January 2025).
UAV Platforms
Most drones are either of a rotary-wing design or are of a fixed-wing configuration (Sandbrook 2015); both types are used to conduct wildlife surveys. Multirotor drones, sometimes referred to as ‘rotocopter drones’, are designed similarly to helicopters and employ multiple rotors that provide lift, stability, and maneuverability. Fixed-wing drones are similar to manned aircraft in that they require forward movement to generate lift and maintain flight.
Multi-rotor Drones
Common designs include quadcopters (four rotors), hexacopters (six rotors), and octocopters (eight rotors). UAVs of this design that are used for wildlife surveys typically range in weight from <1 kg to >10 kg, with rotor disks from 1.5 to 2-m in diameter. There are advantages and disadvantages associated with each design or size, and these must be considered when evaluating the potential for use in mountain sheep surveys. For instance, small drones have limited flight times (typically from 20 to 30 minutes in duration) and, thus, a limited range (Brinkman and Garcelon 2020), but these systems are quieter and easier to launch and retrieve than larger devices. Conversely, multi-rotor drones >10-kg in weight have an extended flight time (up to an hour, and which may be extended as battery life improves) and can operate in more challenging weather conditions, but they are louder and less portable than smaller devices. When selecting the type of rotocopter that is best suited for a particular survey, essential considerations include anticipated duration of flight time, the noise generated by the system, weather conditions, and the type of sensor(s) to be used. Larger rotocopters have greater flexibility in the number, type, and quality of sensors that currently are available, and may allow users to fly at greater AGL to reduce disturbance or increase the amount of area surveyed. When compared with fixed-wing systems, multirotor drones typically are less costly.
Fixed-wing Drones
Fixed-wing systems generally are larger than multirotor designs because they rely on increased wingspans to maintain flight, and they range in size from <3 kg in weight and wingspans from 0.5 to 1.5-m long, to >10 kg in weight with wingspans from 2.5 to 5 m, or greater, in length. Unlike multirotor drones, most fixed-wing systems require either a catapult or a runway for takeoffs and require a runway for landings. These systems are more commonly used to conduct surveys at greater AGL and of a longer duration than rotocopter systems, thereby enhancing their potential utility for mountain sheep surveys.
As with all drones, the bigger the UAV, the heavier the payload: size matters. The larger (>10 kg) fixed-wing UAVs can stay aloft for several hours, whereas smaller (<3 kg) units may sustain flight for up to an hour. As is the case with multirotor systems, large fixed-winged drones enable a heavier payload when compared to smaller models, which allows for greater flexibility in the number, type, and quality of sensors mounted on the system; with increased size, however, comes increased cost.
Larger systems require more advanced runways to launch and land the drone, complicating survey planning and making fewer options for operations potentially being available. These constraints are similar to those affecting the utility of traditional fixed-wing aircraft in that they require appropriate areas for takeoffs and landings. Finally, fixed-wing drone pilots typically require greater operating skill than the pilots of rotocopter drones. Despite these considerations, these specialized tools are well suited for covering large areas while reducing the potential to disturb animals. Fixed-wing UAVs may be more useful than rotocopter drones in areas occupied by thinhorn sheep than those occupied by bighorn sheep, in large part a function of the capability to remain aloft for longer periods and the remote nature of most thinhorn sheep habitat, factors that also affect the utility of manned aircraft.
Remote Sensors
Regardless of the platform, various types of sensors are used for conducting ungulate population surveys with drones and represent a wide range of applications that affect image type, quality, magnification, and resolution. When anticipating the use of a UAV to conduct mountain sheep surveys, it is essential that biologists consider the quality and type of imagery necessary to meet objectives that, at a minimum, include the detection of the species in question and the ability to distinguish between that species and other large mammals that occur in sympatry, and the sex and age of each individual of the target species that is detected. An additional consideration involves the use of still images or video recordings. Either of these may be more suitable for species, sex, and age class identifications, but the choice is dependent on ambient, topographic, or geographic conditions, each of which influences mission planning and, ultimately, mission success. Among such considerations are daily temperature extremes, wind speed, type of substrate (e.g., granitic or metamorphic rock), sand, slope, and overall ruggedness of terrain.
The type and resolution of the sensor(s) employed in UAV surveys is a critically important consideration when designing population surveys for mountain sheep. Sensors that provide imagery of lower resolution than that obtained from more costly units can greatly reduce an investigator’s ability to detect individuals on the landscape and will also restrict the ability to assign animals to sex or age categories. The level of resolution provided by available sensors is affected by multiple factors, including the type and model of the sensor(s), sensor size and weight, camera aperture, camera resolution, focal length, spectral resolution, flight path AGL, sensor orientation, and aircraft speed. Prior to considering the use of UAVs for mountain sheep surveys, investigators should conduct extensive research into the specifications of available sensors—of which new and improved designs are being developed on a frequent basis—and select those that best meet survey objectives.
Sensor Orientation
The orientation of the infrared sensor offers various advantages and disadvantages that must be considered when designing mountain sheep population surveys. Forward-looking sensors are oriented horizontally and allow these sensors to detect visible light or heat signatures ahead of (i.e., in front of) the sensor (Fig. 1). Forward-looking systems are best suited for use in more open terrain and may give observers increased time to visualize animals along the survey path as perspectives change with the flight pattern. This advantage may be lessened in mountainous terrain, however, where hills and ridgelines can obstruct the view of animals completely or provide only a brief opportunity where an individual or group is detectable. Typically, dense vegetation and increased variation in terrain features along the survey path will decrease the detection of animals during surveys when using forward-looking sensors.

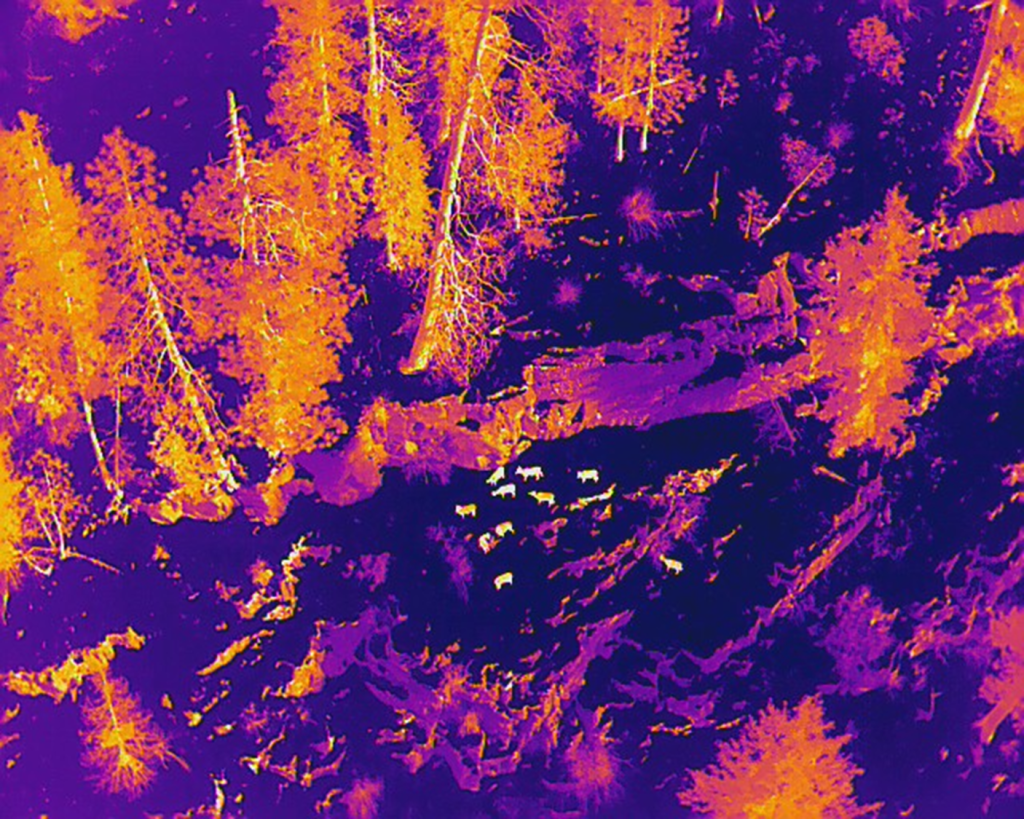
Vertical-looking systems (also referred to as downward-looking sensors or NADIR) allow detection of visible light or thermal signatures underneath (i.e., directly below) the sensor (Fig. 2). This orientation may be more appropriate for surveys in rugged terrain because the amount of vegetation is less or the number of topographic obstructions are fewer directly below the platform, and both reduce the number of ‘blind’ spots encountered along the flight path (Kissell and Nimmo 2011). Use of NADIR, however, is more apt to reduce the time an animal is visible and may influence the ability to accurately classify individuals within a group.
The type and density of cover on the landscape will influence which orientation is best for mountain sheep surveys. If thick overhead vegetation is present, animals may be obscured from vertical-looking sensors, while forward-looking sensors may successfully detect animals that otherwise might not be as visible. When dealing with large topographic features and depending on the distance from these features to an animal, forward-looking sensors may do a poor job of detecting individuals, whereas vertical-looking sensors will not be affected by the same angles of obstruction, potentially yielding increased detection rates. Gimbal-mounted sensors recently have become available and allow pilots to alter position of the sensor(s) as differing conditions are encountered during a flight. We urge biologists considering the use of UAVs for mountain sheep surveys to consult remote sensing experts to discuss mission needs and to test the equipment.
Types of Sensors
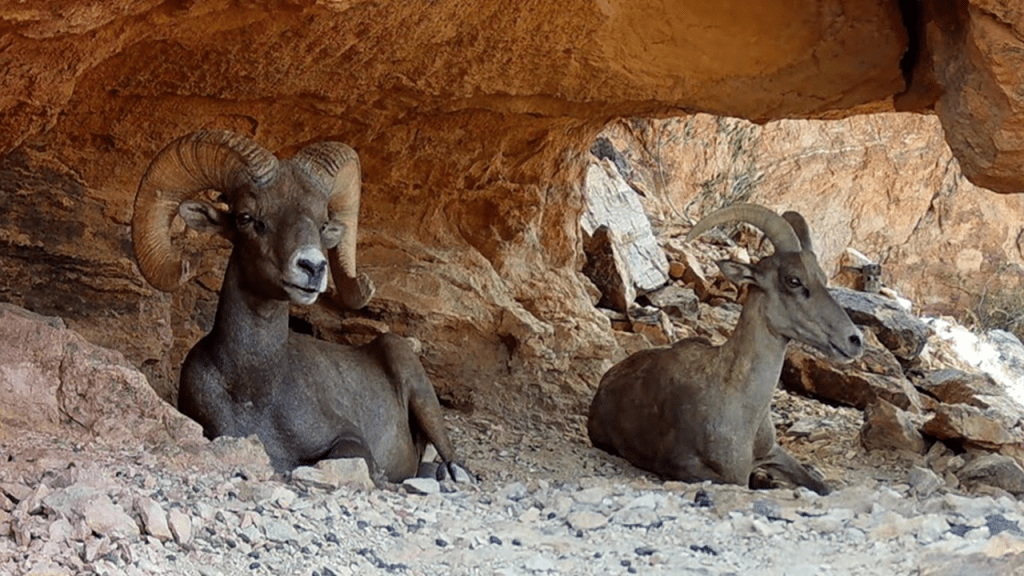
Several types of sensors are available for use in surveys, and brief descriptions are provided here. Red-Green-Blue sensors (RGB) are cameras that capture visible light to create color images by using the red, green, and blue wavelengths; they are commonly used in drone surveys to obtain color images or video, and can be especially useful to identify species, assign individual animals to sex or age categories, or both. These cameras have a variety of magnifications that are useful for surveys occurring during daylight hours, but RGB sensors are not well suited for surveys in areas with thick vegetation that can block targets. In addition, rocky landscapes with minimal vegetation cover also may cause investigators to struggle to distinguish mountain sheep from surrounding landscape features because of similarities between colors of the animals and the background, whether it is soil, rock, or senescent vegetation (Fig. 1). These cameras frequently are employed with thermal-imaging sensors during daytime surveys, and researchers anticipate that refinements in the use of combinations, and enhancements in the ability to interpret results, will increase in the foreseeable future (Lee et al. 2021).
Infrared sensors typically have lower resolution than RGB sensors, although that compromise is reduced in more expensive units (Olmsted 2025). Infrared sensors have been used by wildlife biologists to conduct surveys of wildlife for more than 50 years (Croon et al. 1968; McCullough et al. 1969; Graves et al. 1972; Parker and Driscoll 1972; Wride and Baker 1977). Following enhancements in technology, these sensors have been used to conduct surveys of several ungulate species (Wiggers and Beckerman 1993; Garner et al. 1995; Adams 1995; Naugle et al. 1996; McMahon et al. 2021; Abouelezz and Hobbs 2025), including white-tailed deer (Odocoileus virginianus), moose (Alces alces), and bison (Bison bison).
Previous advances in technology encouraged the use of infrared methods to classify bighorn sheep inhabiting rugged, canyon habitats, wherein investigators used an infrared radiometer in a fixed-wing aircraft to detect and classify Rocky Mountain bighorn sheep (Bernatas and Nelson 2004). With continued improvements in technology, resolution, and concomitant reductions in size and weight, the use of infrared sensors for ungulate surveys has increased over the past decade. This has occurred, in part, because improvements to these sensors have enhanced their ability to increase detection rates of animals in various types or densities of vegetative cover (Fig. 2). As a result, UAVs equipped with high-resolution thermal sensors are experiencing increased use for monitoring wildlife and their habitats (Avila-Sanchez et al. 2024).
Thermal infrared sensors (TIR) are a subset of generalized infrared sensors that detect the heat emitted by objects on the landscape. These sensors display the heat emitted by objects but can be used to measure temperature differentials among those objects. This technology is particularly useful when conducting surveys during low light conditions, at night, or in areas with dense vegetative cover (Fig. 2). These sensors rely on thermal contrasts to differentiate among objects on the landscape (Burke et al. 2019; Beaver et al. 2020; Camacho et al. 2023). When temperature contrasts among those objects and the substrate decline, or ambient temperatures increase, it becomes difficult to discriminate individual animals from their surroundings (Camacho et al. 2023). These conditions result in what is referred to as ‘thermal clutter’ and occur when solar radiation heats the substrate and reduces the contrast of animals against the surface, thereby limiting the ability of observers or data processing software to detect groups of animals (Abouelezz and Hobbs 2025). Obviously, this further enhances the probability that animals will not be detected (Burke et al. 2019; Hennig et al. 2021) and decreases the efficacy of infrared technology (Camacho et al. 2023; J. Blum et al. 2024). It therefore is essential that biologists consider the potential effect of ambient environmental conditions to help ensure that individual animals can be detected (Witczuk et al. 2017; Beaver et al. 2020; Camacho et al. 2023; J. Blum et al. 2024).
Readers of this article are aware that bighorn sheep are commonly found in precipitous terrain that is characterized by rocky substrates or cliffs, and both of which retain heat longer than vegetation. Moreover, bighorn sheep occurring in hot, arid regions also seek shade created by vegetation, which can be very effective at mitigating high ambient temperatures (Bleich et al. 1996; Cain et al. 2008). Additionally, desert bighorn sheep frequently use caves or rocky outcrops (Figs. 3, 4) as sources of shade (Cain et al. 2008) or when responding to aerial disturbances (Fig. 5), and these behaviors are apt to reduce, or even preclude detection by TIR sensors.
{kind=link}


Those considering the use of TIR sensors in these terrain types must be aware of the increased thermal signature of the substrate characteristic of such areas and conduct surveys when the differential between heat signatures of the substrate and bighorn sheep is apt to be greatest; animals obscured by vegetation in such areas, however, likely will remain undetected by TIR sensors. Periods when use of TIR is apt to be most efficacious include the early morning hours during which the thermal differential between the substrate or surface features and mountain sheep on the landscape is maximized. Similarly, the use of this technology to conduct surveys of desert bighorn sheep likely would be most efficacious during the coolest months of the year but other factors, such as the influence of sexual segregation on the distributions of males and females, must be considered if results are to be meaningful (Bleich et al. 1997; Rubin and Bleich 2005; Gissi et al. 2024). Thus, investigators must be aware of the differences in natural history strategies between males and females but also account for temperature contrasts between the target animals and the substrate or vegetation. If these constraints are recognized, TIR sensors produce superior detection rates when compared to other methods (Williams et al. 2020; J. Blum et al. 2024).
Additional But Important Details
Drones have been shown to have many advantages over traditional aerial survey methods, and under some circumstances can improve the ability of biologists to monitor populations. There are, however, limitations that currently influence, and even restrict, the utility of this technology in many settings. The efficacy of UAVs and appropriate sensors are likely to be severely limited in areas occupied by desert bighorn sheep, and in the absence of further enhancements, existing technologies largely are impractical for that purpose. Investigators are reminded that TIR will increase detection rates in dense vegetation, but it will not improve detections of bighorn sheep using rock formations for cover (Figs. 3-5) and may be ineffective if substrate temperature is not fully considered, especially in most areas inhabited by desert bighorn sheep.
High-resolution TIR has distinguished clearly between male and female cervids (Ito et al. 2022; Abouelezz and Hobbs 2025) and may be useful in some species of bovids because the bony core and the tissue underlying the keratinaceous horn material emit differential heat signatures under some conditions (Goodenough et al. 2018; Exum 2022). Thus, when combined with RGB sensors, TIR may be effective for distinguishing between sexes and among age categories (J. Blum et al. 2024; Pfeffer et al. 2024). As of yet, however, this potential has not yet been investigated among North American wild sheep, which exhibit pronounced sexual dimorphism as adults, but in which young males and adult females typically occur in the same social groups until males are ≥2-years-of-age (Geist 1971; Bleich et al. 1997). Young males and adult females are similar in horn morphology, and these sex and age categories can be difficult to distinguish from each other even by experienced observers (Bleich 1998).
Wildlife professionals anticipating the use of a UAV to facilitate their work with mountain sheep are encouraged to keep abreast of new developments in these technologies; with proper planning and utilization, UAVs may replace survey techniques that place delicate equipment at risk of damage or theft, provide more meaningful information, and enhance the safety of those involved in conducting surveys of mountain sheep (Rosario et al. 2020). Nevertheless, investigators considering UAV methods to survey populations of bighorn sheep must, for the time being, consider the following disadvantages. One such concern is that of the limited flight time, especially when compared to helicopters or fixed-wing aircraft. Multirotor UAV systems typically have shorter flight times than fixed-wing systems. These reduced flight times may make the use of drones to survey areas normally covered by traditional survey techniques unfeasible, especially with multirotor drone systems.
Fixed-winged drones are likely the most realistic option for population surveys in many western, and almost certainly in northern, ecosystems occupied by mountain sheep and the vast amount of area that must be covered in those areas. To compensate for this, biologists may consider reducing sizes of survey blocks, or conducting surveys over multiple days to account for these limitations. Doing so will require additional considerations associated with population closure or the increased likelihood of double-counting individuals (Bleich et al. 1990). If sensor resolution is inadequate to distinguish marked from unmarked animals, reactions of individuals to novel sources of disturbance will lead to violations of the basic assumptions associated with mark-recapture methods used to estimate population size (Bleich et al. 1990). Current limitations associated with flight time (Brinkman and Garcelon 2020), the degree of disturbance resulting from noise (Afridi et al. 2024), and the uncertainty of detecting animals (Brack et al. 2018) likely will be reduced as battery technology improves, motors become quieter, sensor resolutions increase, and large drone systems become more affordable.
Constraining the use of drones in the United States, Canada, and Mexico are regulations issued by the Federal Aviation Administration, the Transport Canada and Federal Civil Aviation Agency, and the Federal Civil Aviation Agency, respectively. Restrictions regarding VLOS operation for the use of this technology is a major disadvantage of using UAVs to implement ungulate surveys, but are apt to be especially problematic for surveys of wild sheep. This constraint must be maintained without the aid of ancillary devices, and the placement of visual observers throughout a survey area to comply with the line-of-sight requirement currently is prohibited (FAA 2025). Legislation requiring the FAA to set regulations for beyond VLOS by September of 2025 has been introduced (U.S. Congress 2024), and could result in greater leeway for the use of drones to survey populations of bighorn sheep or Dall’s sheep. Currently, compliance with existing regulations is challenging, and often requires the remote pilot and the survey team to relocate multiple times during ungulate surveys conducted in plains or hilly environments. In areas occupied by mountain sheep, and in particular by desert bighorn sheep, compliance with existing regulations would be virtually impossible in the absence of frequent relocation by the entire survey team, and also exacerbate the potential for behavioral reactions to affect survey results (Bleich et al. 1990, 1994). Pending regulatory changes (U.S. Congress 2024) could remove this limitation on VLOS and enhance the utility of UAV technology for wildlife surveys.
The suitability of UAVs for aerial surveys also may be influenced by weather to a greater degree than airplanes or helicopters. As with any aircraft, a UAV is affected by high winds that reduce stability and can result in crashes. Additionally, ambient temperatures greatly influence performance of the UAV at low AGL, and must be considered in hot, arid environments. Thus, it is essential that users follow manufacturer recommendations when operating drones in high winds or during periods of otherwise inclement weather.
Temperature extremes not only will result in objects in the landscape at times being indistinguishable from one another, but ambient temperature also will have a real-time influence on flying conditions and will further restrict the utility of UAV technology in desert environments. Similarly, physiographic conditions and topography likely will have a greater effect on the efficacy of TIR population surveys in hot, arid environments than surveys conducted in cooler ecosystems (Bernatas and Nelson 2004). In the desert ecosystems of southwestern North America this may be mitigated by conducting surveys during seasons characterized by lower ambient temperatures, during early morning, or conducting surveys at night as advances in technology allow.
Each of these solutions to problems created by ambient temperature create additional complicating factors that must be considered. For instance, traditional aerial surveys generally are conducted prior to the onset of hunting seasons, or during periods of cooler weather following season closures. To maximize survey efficacy, however, flights with drones in arid environments may need to be conducted during periods that overlap hunting seasons, which can have a negative influence on hunter satisfaction, a complaint expressed to us by those whose hunts have been affected by helicopter surveys.
If UAV surveys are conducted during early morning hours, there are obvious seasonal effects that will vary depending on time of year and latitude of the study area and will further influence the area that can be covered at any given time (McElhinny et al. 2024). Surveys conducted in darkness or at night may increase contrast between mountain sheep and habitat or substrate features but also will reduce the ability to identify age classes or distinguish between young male and adult female bighorn sheep. Under those conditions, optical imagery (RGB) cannot be linked with the thermal imagery (TIR) for verification (Lee et al. 2021) of data collected by the TIR sensor.
Differing substrate and vegetation types also vary in the amount of heat emitted, and some habitats used by mountain sheep may limit the ability to distinguish heat signatures of animals from those landscape features (Lethbridge et al. 2019; J. Blum et al. 2024). In snowy environments or during seasons when heavy winter pelage insulates animals from heat loss and helps maintain body temperature, thermal signatures can again be masked, or reflectance from wet and solar-heated rocks can mimic shapes and sizes of target animals. Calibrating TIR to search for specific temperature ranges may, however, improve contrasts between heat signatures of animals and landscape features and enhance the probability of detecting mountain sheep (Burke et al. 2019; Beaver et al. 2020; Preston et al. 2021).
J. Blum et al. (2024) reported poor thermal contrast in the centers of the images obtained by thermal sensors. This result likely influenced detectability of ungulates during UAV surveys and was attributed to the decreased contrast between objects in the center of the image when compared to the outer bounds of the image because the thermal sensor was closer to the center of the transect (i.e., the flight path). This issue was identified primarily at sites characterized by substantial topographic variation and may be especially problematic for mountain sheep populations surveys because of the drastic and sudden changes in topography that characterize their habitat. Further investigation is needed in topographically diverse areas to determine if detection rates are reduced because of decreased contrasts associated with the positioning of objects on the flight line due to their proximity to the center of the camera sensor.
Collision avoidance systems are critically important if drones are to be used to conduct aerial surveys for mountain sheep. Some UAV systems or software do not have this technology, which is designed to prevent the drone from striking obstacles. Failure to use only UAVs that incorporate these technologies will increase crash rates, decrease the effectiveness of or terminate the survey effort, and ultimately will prove costly. Maintaining a consistent AGL also is important for generating repeatable and minimally biased surveys in mountainous terrain and involves incorporation of a digital elevation model (DEM) in flight-planning software. Even when incorporated, however, we have experienced the impact of the unanticipated presence of a prominence along a flight path in bighorn sheep habitat. This concern is likely greater for surveys employing multirotor systems because they operate closer to the ground when compared to fixed-wing systems that operate at greater AGL, but a DEM of adequate resolution to detect rapid terrain changes or the sudden appearance of obstacles is essential if collisions are to be avoided.
Summary
Unmanned aerial vehicles, battery enhancements, imaging technology, remote sensors, deep-learning methods, and the utility of artificial intelligence all are becoming more sophisticated (Wich and Koh 2018; Rosario et al. 2020; Lee et al. 2021; Williams 2024; Graves et al. 2022; Dumenčić et al. 2025). These advances are accumulating rapidly, being applied across a broad spectrum of taxa, expanding in capability, and recently have been employed successfully to investigate demographic data that previously were too difficult, expensive, or dangerous to obtain (Graves et al. 2022; McNew et al. 2025; Nègre et al. 2025; Rhodes et al. 2025). An additional advantage is that digital data can be retained indefinitely and thereby provide a permanent, long-term means to evaluate population responses to experimental treatments or adaptive management actions (Graves et al. 2022).
Investigators can anticipate a continuing trend in advancements and capabilities of drone and sensor technologies, and it is probable that the limitations noted herein will be greatly reduced, and in some cases even eliminated (Iglay et al. 2024). Because of this rapid evolution, the potential utility of these methods for conducting mountain sheep surveys will continue to increase (Brinkman and Garcelon 2020; Bleich et al. in press). We anticipate these advances will be especially useful in those geographic areas occupied by desert bighorn sheep, followed by increased applications in those remote areas occupied by thinhorn sheep at high latitudes, and eventually throughout the general distribution of all North American wild sheep. If we are correct, there will be a concomitant decline in the use of traditional aircraft for conservation purposes that will result in fewer accidents—the leading cause of accidental deaths among wildlife professionals (Sasse 2003; Wiegman and Taneja 2003). Future investigators have much to look forward to.
Acknowledgments
We thank T. Smucker (Montana Fish, Wildlife, and Parks), T. Glenner and R. Abella-Vu (California Department of Fish and Game [CDFG]), and J. Miller for the images included herein; and 2 anonymous reviewers for helpful comments that improved the manuscript. R. Anthes and T. Evans (CDFG), and D. Landells, S. deJesus, and B. Nowak (Landells Aviation) provided the authors and numerous others with many hundreds of hours of safe flight time while conducting surveys of bighorn sheep, elk, and mule deer in traditional aircraft. Fixed-wing aircraft and helicopters have, for decades, been the primary means of conducting surveys of large mammals world-wide, and the authors acknowledge natural resource pilots around the globe for their contributions to wildlife management and conservation. This is Professional Paper 155 from the Eastern Sierra Center for Applied Population Ecology.
Literature Cited
- Abouelezz, H. G., and N. T. Hobbs. 2025. A high-altitude thermal infrared method for estimating moose abundance and demography in Rocky Mountain National Park, USA. Wildlife Biology 2025:e01368. https://doi.org/10.1002/wlb3.01368
- Adams, K. P. 1995. Evaluation of moose population monitoring techniques and harvest data in New Hampshire. Thesis, University of New Hampshire, Durham, NH, USA.
- Afridi, S., K. Hlebowicz, D. Cawthorne, and U. P. S. Lundquist. 2024. Unveiling the impact of drone noise on wildlife: a crucial research imperative. International Conference on Unmanned Aircraft Systems 2024:1409–1416. Chania, Crete, Greece. https://doi10.1109/icuas60882.2024.10557094
- Afridi, S., L. Laporte-Devylder, J. M. Kline, S. G. Penny, K. Hlebowicz, D. Cawthorne, and U. P. S. Lundquist. 2025. Impact of drone disturbances on wildlife: a review. Drones 9(4):311. https://doi.org/10.3390/drones9040311
- Ascagorta, O., M. D. Pollicelli, F. R. Iaconis, E. Eder, M. Vázquez-Sano, and C. Delrieux. 2025. Large-scale coastal marine wildlife monitoring with aerial imagery. Journal of Imaging 11(4):94. https://doi.org/10.3390/jimaging11040094
- Avila-Sanchez, J. S., H. L. Perotto-Baldivieso, L. D. Massey, J. A. Ortega-S., L. A. Brennan, and F. Hernandez. 2024. Evaluating the use of a thermal sensor to detect small ground-nesting birds in semi-arid environments during winter. Drones 8:64.
- Bangs, P. D., P. R. Krausman, K. E. Kunkel, and Z. D. Parsons. 2005. Habitat use by desert bighorn sheep during lambing. European Journal of Wildlife Research 51:178–184.
- Beaver, J. T., R. W. Baldwin, M. Messinger, C. H. Newbolt, S. S. Ditchkoff, and M. R. Silman. 2020. Evaluating the use of drones equipped with thermal sensors as an effective method for estimating wildlife. Wildlife Society Bulletin 44:434–443.
- Bernatas, S., and L. Nelson. 2004. Sightability model for California bighorn sheep in canyonlands using forward-looking infrared (FLIR). Wildlife Society Bulletin 32:638–647.
- Bleich, V. C. 1998. Importance of observer experience in determining age and sex of mountain sheep. Wildlife Society Bulletin 26:877–880.
- Bleich, V. C., R. T. Bowyer, A. M. Pauli, M. C. Nicholson, and R. W. Anthes. 1994. Mountain sheep Ovis canadensis and helicopter surveys: ramifications for the conservation of large mammals. Biological Conservation 70:1–7.
- Bleich, V. C., R. T. Bowyer, A. M. Pauli, R. L. Vernoy, and R. W. Anthes. 1990. Responses of mountain sheep to aerial sampling using helicopters. California Fish and Game 76:197–204.
- Bleich, V. C., R. T. Bowyer, and J. D. Wehausen. 1997. Sexual segregation in mountain sheep: resources or predation? Wildlife Monographs 134:1–50.
- Bleich, V. C., E. F. Cassirer, L. E. Oldenburg, V. L. Coggins, and D. L. Hunter. 2004. Predation by a golden eagle, Aquila chrysaetos, on a juvenile mountain sheep, Ovis canadensis. California Fish and Game 90:91–93.
- Bleich, V. C., D. W. Lutz, M. E. Blum, D. M. Glass, S. G. Torres, and J. C. Whiting. In press. Surveying mountain sheep populations. Chapter 14in P. R. Krausman and B. Jex, editors. Mountain Sheep in North America: Biology, Conservation, Ecology, and Management. CRC Press, Boca Raton, FL, USA.
- Bleich, V. C., B. M. Pierce, J. L. Davis, and V. L. Davis. 1996. Thermal characteristics of mountain lion dens. Great Basin Naturalist 56:276–278.
- Blum, J., A. M. Foley, R. W. DeYoung, D. G. Hewitt, J. Baumgardt, M. W. Hellickson, and H. L. Perotto-Baldivieso. 2024. Evaluation of drone surveys for ungulates in southwestern rangelands. Wildlife Society Bulletin 48:e1515.
- Blum, M. E., F. E. Buderman, J. R. Bennett, K. M. Stewart, M. Cox, and P. J. Williams. 2023. Comparing contemporary models to traditional indices to estimate abundance of desert bighorn sheep. Journal of Wildlife Management 87:e22517. https://doi.org/10.1002/jwmg.22517
- Blum, M. E., C. P. Lehman, J. T. Hogg, T. D. Nordeen, M. Cox, H. M. Miyasaki, E. F. Cassirer, and K. L. Monteith. 2024. Capture and handling of neonates. Pages 8.1–8.20 in V. C. Bleich and D. W. Lutz, editors. Wild Sheep Capture and Handling Guidelines. 2nd edition. Western Association of Fish and Wildlife Agencies, Boise, ID, USA.
- Brack, I. V., K. Kindel, and L. F. B. Oliveira. 2018. Detection errors in wildlife abundance estimates from unmanned aerial systems (UAS) surveys: synthesis, solutions, and challenges. Methods in Ecology and Evolution 9:1864–1873. https://doi.org/10.1111/2041-210X.13026
- Brinkman, M. P., and D. K. Garcelon. 2020. Applying UAV systems in wildlife management. Vertebrate Pest Conference Proceedings 29(2):1–4. https://escholarship.org/uc/item/42s2d8q9
- Brushett, A., J. Whittington, B. Macbeth, and J. M. Fryxell. 2023. Changes in movement, habitat use, and response to human disturbance accompany parturition events in bighorn sheep (Ovis canadensis). Movement Ecology 11(1):36.
- Burke, C., M. Rashman, S. Wich, A. Symons, C. Theron, and S. Longmore. 2019. Optimizing observing strategies for monitoring animals using drone-mounted thermal infrared cameras. International Journal of Remote Sensing 40:439–467.
- Cain, J. W., III, B. D. Jansen, R. Wilson, and P. R. Krausman. 2008. Potential thermoregulatory advantages of shade use by desert bighorn sheep. Journal of Arid Environments 72:1518–1525.
- Camacho, A. M., H. L. Perotto-Baldivieso, E. P. Tanner, A. L. Montemayor, W. A. Gless, J. Exum, T. J. Yamashita, A. M. Foley, R. W. DeYoung, and S. D. Nelson. 2023. The broad scale impact of climate change on planning aerial wildlife surveys with drone-based thermal cameras. Scientific Reports 13:4455.
- Côté, S. D., S. Hamel, A. St‐Louis, and J. Mainguy. 2013. Do mountain goats habituate to helicopter disturbance? Journal of Wildlife Management 77:1244–1248.
- Croon, G. W, D. R. McCullough, C. E. Olson, and L. M. Queal. 1968. Infrared scanning techniques for big game censusing. Journal of Wildlife Management 32:751–759.
- Delisle, Z. J., P. G. McGovern, B. G. Dillman, and R. K. Swihart. 2022. Imperfect detection and wildlife density estimation using aerial surveys with infrared and visible sensors. Remote Sensing in Ecology and Conservation 9:222–234.
- Ditmer, M. A., J. B. Vincent, L. K. Werden, J. C. Tanner, T. G. Laske, P. A. Iaizzo, D. L. Garshelis, and J. R. Fieberg. 2015. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Current Biology 25:2278–2283.
- Dumenčić, S., L. Lančaa, K. Jakaca, and S. Ivić. 2025. Experimental validation of UAV search and detection system in real wilderness environment. Drones 9(7):473. https://doi.org/10.3390/drones9070473
- Exum, J. 2022. Estimating white-tailed deer population sizes using unmanned aerial vehicles. Thesis, Texas A&M University, Kingsville, TX, USA.
- Federal Aviation Administration (FAA). 2025. Drones. U.S. Department of Transportation, Washington, D.C., USA. Available from: https://www.faa.gov/uas (Accessed 11 February 2025)
- Finnegan, S. P., W. Dunker, N. J. Svoboda, and S. Rauchenstein. 2024. Spy in the sky: application of thermal drones to assist with ground darting wildlife. Wildlife Society Bulletin 48:e1560.
- Frid, A. 2003. Dall’s sheep responses to overflights by helicopter and fixed-wing aircraft. Biological Conservation 110:387–399.
- Garner, D. L., H. B. Underwood, and W. E. Porter. 1995. Use of modern infrared thermography for wildlife population surveys. Environmental Management 19:233–238.
- Geist, V. 1971. Mountain Sheep: A Study in Behavior and Evolution. University of Chicago Press, Chicago, IL, USA.
- Gissi, E., R. T. Bowyer, and V. C. Bleich. 2024. Sex-based differences affect conservation. Science 384:1309–1310.
- Goodenough, A. E., W. S. Carpenter, L. MacTavish, C. Theron, M. Delbridge, and A. G. Hart. 2018. Identification of African antelope species: using thermographic videos to test the efficacy of real-time thermography. African Journal of Ecology 56:898–907.
- Graves, H. B., E. D. Bellis, and W M. Knuth. 1972. Censusing white-tailed deer by airborne thermal infrared imagery. Journal of Wildlife Management 36:875–884.
- Graves, T. A., M. J. Yarnall, A. N. Johnston, T. M. Preston, G. W. Chong, E. K. Cole, W. M. Janousek, and P. C. Cross. 2022. Eyes on the herd: quantifying ungulate density from satellite, unmanned aerial systems, and GPS collar data. Ecological Applications 32(5):e2600. https://doi.org/10.1002/eap.2600
- Hennig, J. D., K. A. Schoenecker, M. L. N. Terwilliger, and G. W. Holm. 2021. Comparison of aerial thermal imagery and helicopter surveys of bison (Bison bison) in Grand Canyon National Park, USA. Sensors 21:5087.
- Iglay, R. B., L. R. Jones, J. A. Elmore, K. O. Evans, S. Samiappan, M. B. Pfeiffer, and B. F. Blackwell. 2024. Wildlife monitoring with drones: a survey of end users. Wildlife Society Bulletin 48:e1533.
- Ito, T. Y., A. Miyazaki, L. A. Koyama, K. Kamada, and D. Nagamatsu. 2022. Antler detection from the sky: deer sex ratio monitoring using drone-mounted thermal infrared sensors. Wildlife Biology 2022:e01034.
- Jackson, R. M., B. Munkhtsog, B. Munkhtsog, B. Hunter, D. Rice, and D. O. Hunter. 2024. Harnessing drones for snow leopard prey surveys. Snow Leopard Reports 3:1–8.
- Kissell, Jr., R. E., and S. K. Nimmo. 2011. A technique to estimate white-tailed deer Odocoileus virginianus density using vertical-looking infrared imagery. Wildlife Biology17:85–92.
- Krausman, P. R., and J. J. Hervert. 1983. Mountain sheep responses to aerial surveys. Wildlife Society Bulletin 11:372–375.
- Krausman, P. R., L. K. Harris, and J. S. Ashbeck. 1998a. The effects of aircraft noise on pronghorn and other species: an annotated bibliography. U.S. Geological Survey, Cooperative Park Studies Unit Special Report 14:1–49.
- Krausman, P. R., M. C. Wallace, C. L. Hayes, and D. W. DeYoung. 1998b. Effects of jet aircraft on mountain sheep. Journal of Wildlife Management 62:1246–1254.
- Lee, S., Y. Song, and S.-H. Kil. 2021. Feasibility analyses of real-time detection of wildlife using UAV-derived thermal and RGB images. Remote Sensing 13:2169.
- Lenzi, J., C. J. Felage, R. Newman, B. McCann, and S. N. Ellis-Felege. 2022. Feral horses and bison at Theodore Roosevelt National Park (North Dakota, United States) exhibit shifts in behaviors during drone flights. Drones 6:136.
- Lethbridge, M., M. Stead, and C. Wells. 2019. Estimating kangaroo density by aerial survey: a comparison of thermal cameras with human observers. Wildlife Research 46:639–648.
- Linchant, J., S. Lhoest, S. Quevauvillers, P. Lejeune, C. Vermeulen, J. S. Ngabinzeke, B. L. Belanganayi, W. Delvingt, and P. Bouche. 2018. UAS imagery reveals new survey opportunities for counting hippos. PLOS ONE 13:e0206413.
- Linchant, J., J. Lisein, J. Semeki, P. Lejeune, and C. Vermeulen. 2015. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mammal Review 45:239–252.
- Martin, C. S. 2014a. The drone debate: the intersection of drone technology and wildlife work. Wildlife Professional 8(4):18–23.
- Martin, C. S. 2014b. How drones curb poaching: new eyes in the sky fight illegal wildlife harvest. Wildlife Professional 8(4):22.
- McElhinny, J. S., G. D. Larsen, M. Messinger, C. H. Newbolt, A. Whitworth, S. S. Ditchkoff, M. R. Silman, and J. T. Beaver. 2024. Experimental assessment of large mammal population estimates from airborne thermal videography. Wildlife Biology 2025:e01557. https://doi.org/10.1002/wlb3.01557
- McMahon, M. C., M. A. Ditmer, E. J. Isaac, S. A. Moore, and J. D. Forester. 2021. Evaluating unmanned aerial systems for the detection and monitoring of moose in northeastern Minnesota. Wildlife Society Bulletin 45:312–324.
- McMahon, M. C., M. A. Ditmer, and J. D. Forester. 2020. Comparing unmanned aerial systems with conventional methodology for surveying a wild white-tailed deer population. Wildlife Research 49:54–65.
- McNew, L. B., J. Hanlon, and I. Buzytsky. 2025. The performance of drones and artificial intelligence for monitoring sage-grouse at leks. Wildlife Biology 2025:e01482. https://doi.org/10.1002/wlb3.01482
- Melody, D., and A. Trausch. 2024. Summary report: aerial infrared detection survey of bighorn sheep in Lower Owyhee Heard (sic) Range, Oregon. Owyhee Air Research LLC, Nampa, ID, USA.
- Mo, M., and K. Bonatakis. 2022. An examination of trends in the growing scientific literature on approaching wildlife with drones. Drone Systems and Applications 10:111–139.
- Naugle, D. E., J. A. Jenks, and B. J. Kernohan. 1996. Use of thermal infrared sensing to estimate density of white-tailed deer. Wildlife Society Bulletin 24:37–43.
- Nègre, P., K. Mahé, and J. Cornacchini. 2025. Unmanned aerial vehicle (UAV) paired with LiDAR sensor to detect bodies on surface under vegetation cover: preliminary test. Forensic Science International 369:112411. https://doi.org/10.1016/j.forsciint.2025.112411
- Olmsted, J. S. 2025. Pigs in darkness. American Hunter 53(3):30–33.
- Padilla, C., D. Walsh, N. DeCesare, and P. Iacono. 2024. Statewide adaptive management of bighorn sheep and mountain goats. Annual report, Federal Aid in Wildlife Restoration Grant W-197-R. Montana Fish, Wildlife, and Parks, Helena, MT, USA.
- Parker, D. H., and R. S. Driscoll. 1972. An experiment in deer detection by thermal scanning. Rangeland Ecology and Management 25:480–481.
- Pfeffer, D. G., J. A. Foster, and J. C. Kinsey. 2024. Using unmanned aerial vehicles equipped with thermal cameras to survey a known population of white-tailed deer. Journal of Fish and Wildlife Management 15:283–288.
- Preston, T. M., M. L. Wildhaber, N. S. Green, J. L. Albers, and G. P. Debenedetto. 2021. Enumerating white-tailed deer using unmanned aerial vehicles. Wildlife Society Bulletin 45:97–108.
- Rahman, D. A., R. Herliansyah, B. Subhan, D. Hutasoit, M. A. Imron, D. B. Kurniawan, T. Sriyanto, R. D. Wijayanto, M. H. Fikriansyah, A. F. Siregar, and N. Santoso. 2023. The first use of a photogrammetry drone to estimate population abundance and predict age structure of threatened Sumatran elephants. Scientific Reports 13:21311.
- Rhodes, G. A., D. L. Bakner, H. C. Sabatier, B. S. Sedinger, C. A. Nicolai, and K. M. Ringelman. 2025. Drone‐based radiotelemetry and imagery systems provide an advantage over traditional techniques for estimating survival of dependent juveniles. Wildlife Society Bulletin 49:e1576. https://doi.org/10.1002/wsb.1576
- Rosario, R. C., M. K. Clayton, and I. T. Gates. 2020. Use of unmanned aerial vehicles in wildlife ecology. Pages 387–394 in N. J. Silvy, editor. The Wildlife Techniques Manual. Volume 1. 8th edition. Johns Hopkins University Press, Baltimore, MD, USA.
- Rubin, E. S., and V. C. Bleich. 2005. Sexual segregation: a necessary consideration in wildlife conservation. Pages 379–391 in K. E. Ruckstuhl and P. Neuhaus, editors. Sexual Segregation in Vertebrates: Ecology of the Two Sexes. Cambridge University Press, Cambridge, UK.
- Sandbrook, C. 2015. The social implications of using drones for biodiversity conservation. Ambio 44:s636–s647.
- Sasse, G. B. 2003. Job-related mortality of wildlife workers in the United States, 1937–2000. Wildlife Society Bulletin 31:1015–1020.
- Scotton, B. D., and D. H. Plestscher. 1998. Evaluation of a capture technique for neonatal Dall sheep. Wildlife Society Bulletin 26:579–583.
- Sekulic, Z., S. Kunovac, and B Paprica. 2021. Habitats and seasonal migration of chamois (Rupicapra rupicapra balcanica, Bolkay 1925) in special hunting ground “Zelengora” and “Sutjeska” National Park. Works of the Faculty of the University of Sarajevo 51(1):3–11.
- Stockwell, C. A. 1991. Behavioral reactions of desert bighorn sheep to avian scavengers. Journal of Zoology 225:563–566.
- Stockwell, C. A., G. C. Bateman, and J. Berger. 1991. Conflicts in national parks: a case study of helicopters and bighorn sheep time budgets at the Grand Canyon. Biological Conservation 56:317–328.
- U.S. Congress. 2024. FAA reauthorization act of 2024. Senate Bill 1939. 118th Congress of the United States, Washington, D.C., USA. Available from: https://www.congress.gov/bill/118th-congress/senate-bill/1939/text (Accessed 2 April 2025)
- Wakeling, B. F., V. C. Bleich, M. E. Blum, and J. A. Dellinger. In press. Relationships among mountain sheep and their predators. Chapter 9 in P. R. Krausman and B. Jex, editors. Mountain Sheep in North America: Biology, Conservation, Ecology, and Management. CRC Press, Boca Raton, FL, USA.
- Watts, A. C., J. H. Perry, S. E. Smith, M. A. Burgess, B. E. Wilkinson, Z. Szantoi, G. G. Ifiu, and H. F. Percival. 2010. Small unmanned aircraft systems for low-altitude aerial surveys. Journal of Wildlife Management 74:1614–1619.
- Wehausen, J. D., and V. C. Bleich. 2007. Influence of aerial search time on survey results. Desert Bighorn Council Transactions 49:23–29.
- Wich, S. A., and L. P. Koh. 2018. Conservation Drones: Mapping and Monitoring Biodiversity. Oxford University Press, Oxford, UK.
- Wiegman, D. A., and N. Taneja. 2003. Analysis of injuries among pilots involved in fatal general aviation airplane accidents. Accident Analysis and Prevention 35:571–577.
- Wiggers, E. P., and S. E. Beckerman. 1993. Use of thermal infrared sensing to survey white-tailed deer populations. Wildlife Society Bulletin 21:263–268.
- Wild Sheep Foundation. 2021. Position statement: effects of recreational and commercial use of drones on wild sheep. Wild Sheep Foundation, Bozeman, MT, USA. Available from: www.wildsheepfoundation.org › cache › DOC391_Drone
- Williams, K. F. 2024. Thermal Imaging for Wildlife Applications. Pelagic Publishing, London, UK.
- Williams, P. J., C. Schroeder, and P. Jackson. 2020. Estimating reproduction and survival of unmarked juveniles using aerial images and marked adults. Journal of Agricultural, Biological and Environmental Statistics 25:133–147.
- Witczuk, J., S. Pagacz, A. Zmarz, and M. Cypel. 2017. Exploring the feasibility of unmanned aerial vehicles and thermal imaging for ungulate surveys in forests—preliminary results. International Journal of Remote Sensing39:5504–5521.
- Wride, M. C., and K. Baker. 1977. Thermal imagery for census of ungulates. International Symposium on Remote Sensing of the Environment Proceedings 11:1091–1099.
- Zabel, F., M. A. Findlay, and P. J. C. White. 2023. Assessment of the accuracy of counting large ungulate species (red deer Cervus elaphus) with UAV-mounted thermal infrared cameras during night flights. Wildlife Biology 2023:e01071.